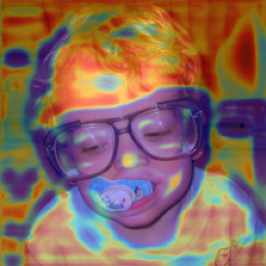
(1) Colorizing the Prokudin-Gorskii Photo Collection (2) Filters and Frequencies (3) Face Morphing and Modelling a Photo Collection (4) Image Auto-stitching and Mosaicing (5) Facial Keypoint Detection with Convolutional Neural Networks (6A) Image Quilting for Texture Synthesis & Transfer (6B) Neural Artistic Style